|
Pascal Sikorski I'm an incoming Computer and Information Science PhD student in the GRASP lab at the University of Pennsylvania, co-advised by Prof. Vijay Kumar and Prof. George Pappas. I am supported by the NSF Graduate Research Fellowship. Currently, I'm a Computer Science and Mathematics undergraduate Goldwater Scholar at Saint Louis University, working under Prof. Madi Babaiasl at the Mecharithm Lab. I've been fortunate to work with many great researchers during my undergraduate experience. Recently, I worked with Prof. Joseph Davidson at the Oregon State University Intelligent Machines and Materials Lab on safe robotic crop manipulation. Previously, I've worked with Prof. Aaron Ames and Dr. Xiao Tan at the Caltech AMBER Lab on risk-aware control for autonomous navigation. Feel free to reach out if you are interested in my work or wish to start a chat! |
|
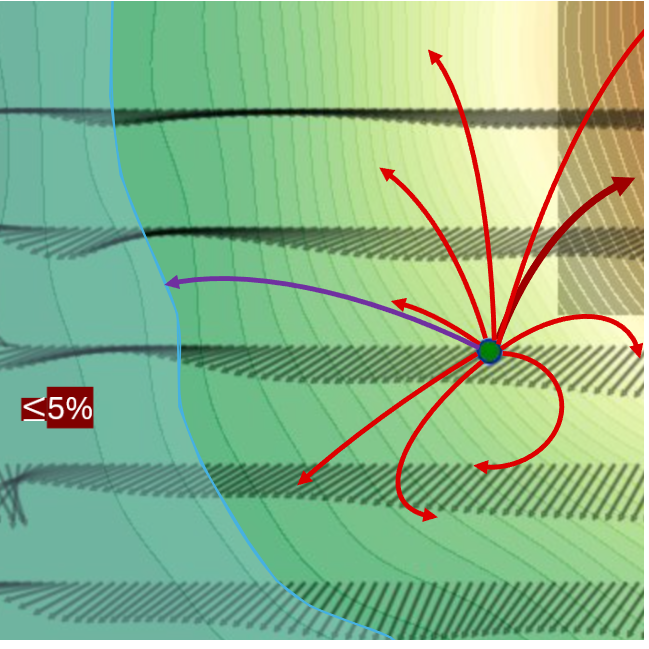
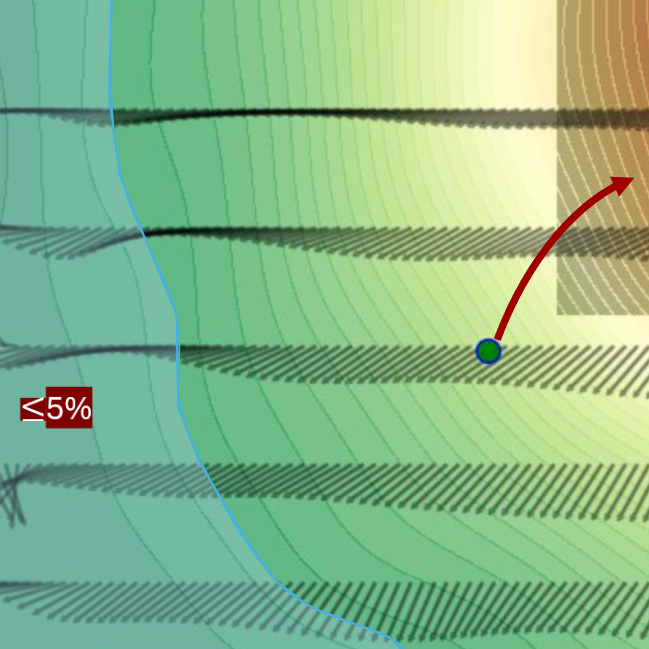
ResearchI'm interested in multi-robot systems, collaborative robotics/human-robot interaction, and game theory for solving real-time group planning problems found in field-robotic applications (such as agriculture, human-assistive care). Most of my research utilizes aspects of SLAM and human-centric design to solve challenges in planning/control. |




Miscellaneous |
|
Teaching Assistant at Saint Louis University:
CSCI 3100 Spring 2026, MENG 4930/5930 Fall 2025, CSCI 2100 Spring 2024, CSCI 1060 Fall 2023. |

|
I used to play professional Overwatch esports,
See my wiki-page. |
|
This page template comes from Jon Barron. Here is the source code he's provided. |